
| Tiago is a modular robot developed by PAL Robotics, in Barcelona, Spain. The version of the robot used for this thesis is an IRON TIAGo that was customized based on the requirements of the EU H2020 ENRICHME research project. The robot features a mobile base, a lifting torso, a touchscreen mounted on the torso, and a head. The differential-drive mobile base contains an on-board computer, a laser range-finder, three rear sonars, and an Inertial Measurement Unit, and it has two degrees of freedom. The maximum speed for the base is of 1m/s. The torso is equipped with an internal lifter mechanism which allows changing the height of the robot (between 110 and 145 cm). On the torso of the robot a touchscreen is also mounted. The head is equipped with a pan-tilt mechanism (i.e., 2 degrees of freedom). Other sensors included in the head of the robot are an Orbbec Astra RGB-D, two stereo microphones and a speaker. On top of the head an USB-powered Optris PI460 thermal camera was mounted as well. The robot features a navigation system that can be used to perform the mapping as well as to enable the robot to autonomously navigate on a given map. The robot is integrated with the Acapela voice synthesis software for which a ROS interface was created. |  |

|
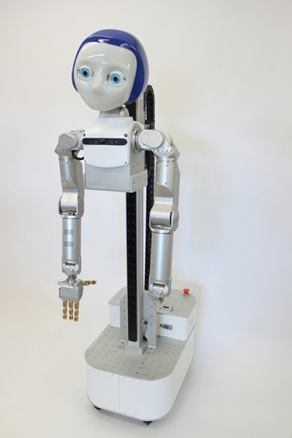
Meka has been designed to work in human-centered environments. The robot features compliant force control throughout its body, a sensor head, durable and strong hands, and an omnidirectional base with Prismatic Lift. Each arm has 7 DOF Series Elastic Actuators and features high-strength force-controlled actuators, intrinsic physical compliance, and zero-backlash Harmonic Drive gearheads. The head is a 7 DOF robotic active vision head. Designed for a wide range of expressive postures, it is the ideal platform for researchers nterested in human-robot interaction and social robotics. The head system features high resolution FireWire cameras in each eye, integrated DSP controllers, and zero-backlash Harmonic Drive gearheads in the neck. Each hand is a fullycontained 5 DOF underactuated hand. It is approximately human size with intrinsic physical compliance and force feedback, making it ideal for researchers interested in dexterous manipulation within human environments. |
| Kompai is a mobile robot designed by Robosoft. The robot is equipped with an ASUS XTion Pro RGB-D sensor mounted beneath its head, an Optris PI450 thermal camera mounted on the head, and different sensors for measuring ambiental parameters. On the torso of the robot is a touchscreen whose purpose is to facilitate the interaction with the user. Alongside the touchscreen, the robot uses speech recognition and synthesis to communicate. | 
|

|
Alice is a mini-humanoid robot designed by Hanson Robotics. It comes with a full set of Dynamixel RX-28 and RX-64 servos, plus a sensor suite that includes an IMU, gyro, accelerometer, compass, torque sensors, touch sensors, and even temperature sensors. Moreover, the head is equipped with skin, made of our patented Frubber material. This is a biomimetic polymer that contracts and folds like skin. |
| iCub is a 54 degrees (7 for each arm ; 9 for each hand ; 6 for the head; 3 for the torso and spine ; 6 for each leg) of freedom humanoid robot designed by the RobotCub Consortium. The main goal of this platform is to study cognition through the implementation of biological motivated algorithms. This is an open project in many different ways: it distributes its platform openly and it develops software open-source. | 
|
|
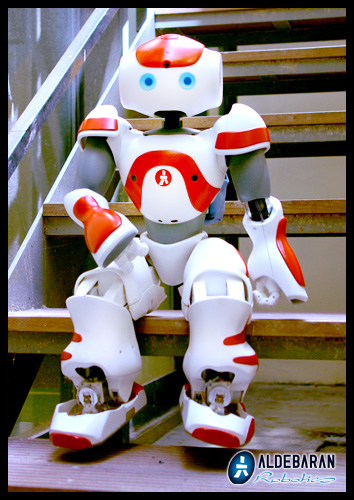
Nao is a 60 cm (23 inches) humanoid robot developed by Aldebaran Robotics. Nao is a 25 degrees of freedom robot, equipped with an inertial sensor, two cameras and many other sensors, including a sonar which allow it to comprehend its environment with stability and precision. |
| Pioneer 3-DX (Active Media Robotics) is a mobile robotic platform equipped with laser range finders, sonars, and camera. | 
|
