 Mon
bac à sable de Legos
Mon
bac à sable de Legos Mon
bac à sable de Legos
Mon
bac à sable de Legos

(Cliquez l'image pour l'agrandir.)
(Cliquez l'image pour l'agrandir.)
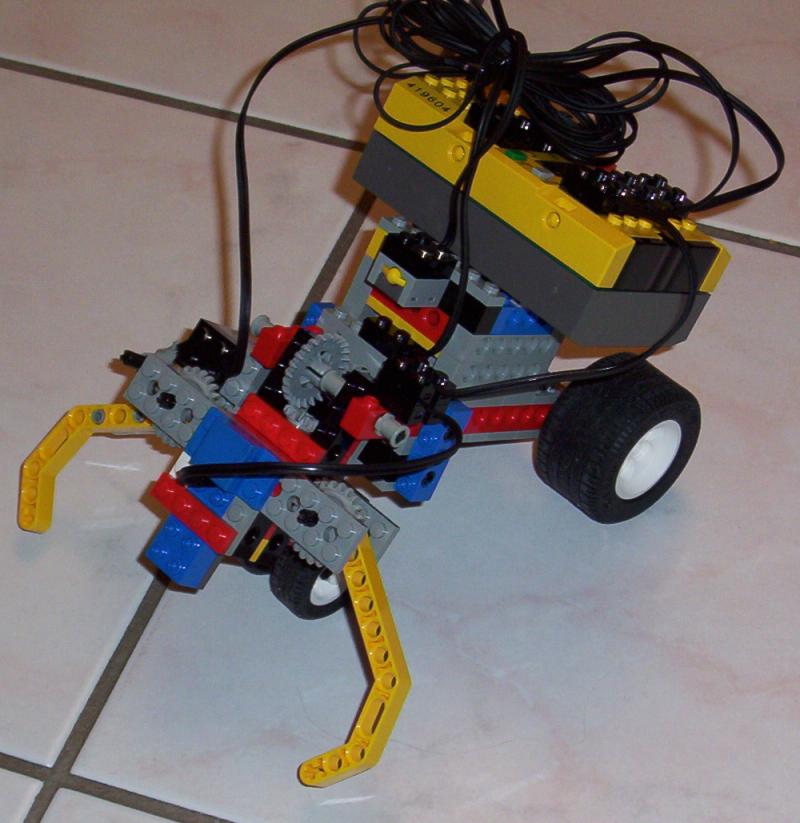
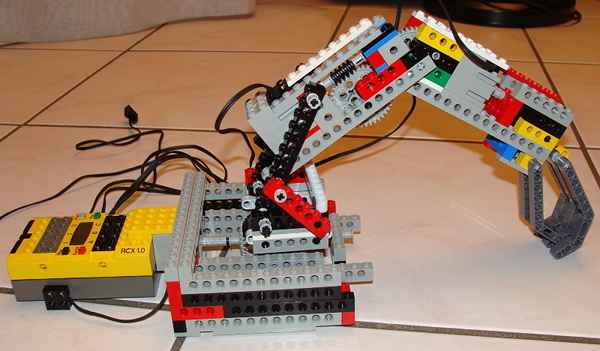
Ce robot a pour unique but de saisir ce que vous lui présentez entre ses pinces et d'aller le jeter devant lui à une distance donnée, puis de revenir à sa place attendre que vous lui donniez autre chose à aller jeter. Malheureusement, je n'a jamais fait de modèle MLCAD pour ce robot.
N'ayant alors que 2 moteurs, le déplacement de ce robot est très simple: il ne tourne pas. Il va en avant un certain temps, puis recule le même certain temps. Ainsi il revient à sa place.
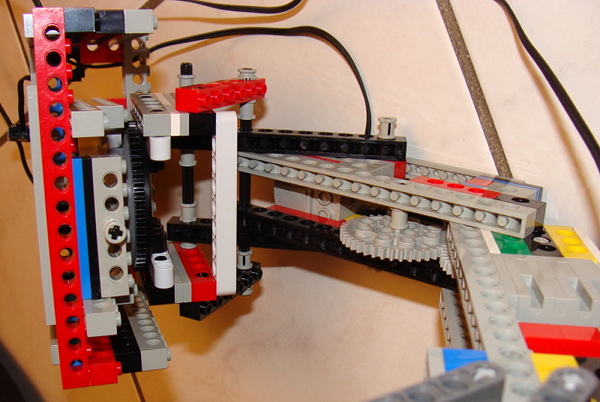
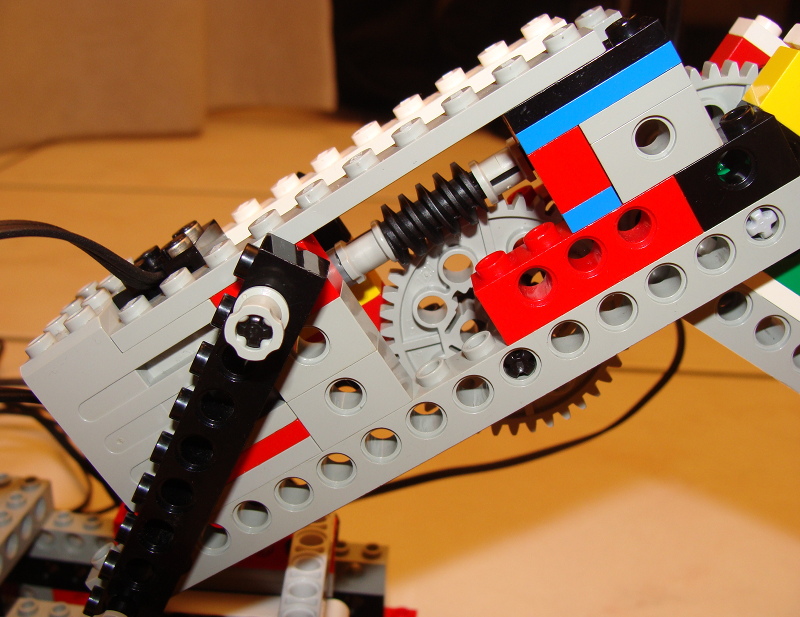
Pour ce qui est de la pince, il ne me restait qu'un seul moteur pour faire le mouvement de serrage et de relevage une fois l'objet serré. Pour y parvenir, j'ai utilisé le mécanisme de « double-fonction » sur un même mouvement de rotation. La fonction secondaire, exécutée en premier est le serrage. Une fois que les pinces sont bloquées, elles bloquent l'axe de rotation secondaire et transmettent donc le mouvement à l'axe primaire qui a pour effet de relever le bloc-pince. Un capteur de pression est placé à la verticale de ce bloc afin de signaler qu'il faut arrêter le moteur une fois que ce bloc est arrivé en position verticale (pour ne pas laisser le moteur chauffer).

(Cliquez sur les images pour agrandir.)
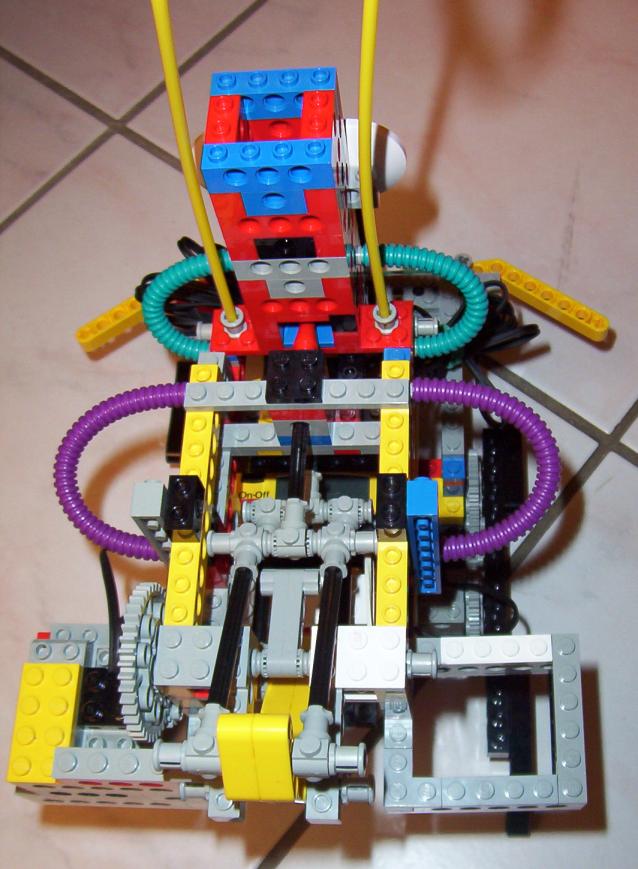
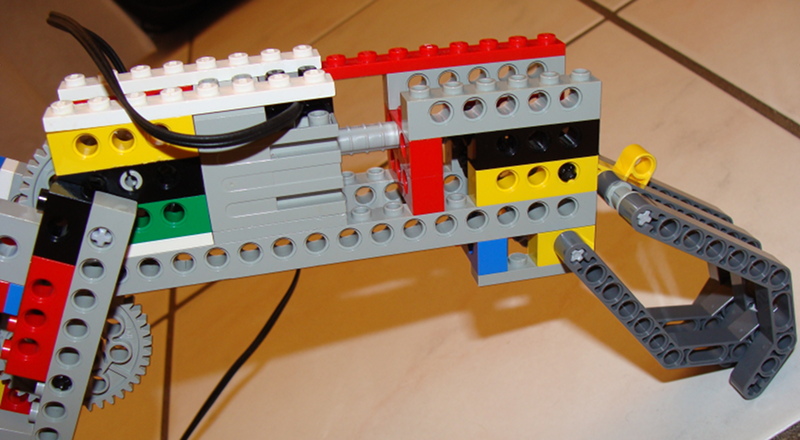
Ce robot a pour but de tirer des projectiles en automatique. Il possède un chargeur contenant plusieurs projectiles et les tire les uns après les autres. Ma version est en plus motorisée pour se déplacer. Le robot se déplace jusqu'à heurter un obstacle, une fois heurté, il recule en tournant pour se positionner bien en face, tire une salve de 2 ou 3 balles, puis recule en tournant afin de changer de direction, et enfin repart tout droit à la recherche d'une autre cible. Il est toutefois possible de ne pas faire se déplacer le robot, on obtient alors un canon fixe.
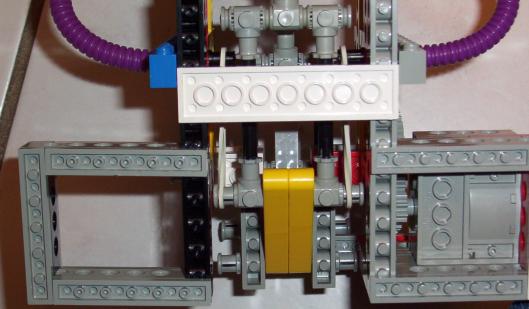
Vous pouvez télécharger les instructions de constructions au format de l'excellent modeleur MLCAD ici (fichier Turret.ldr). Il faut juste penser à rajouter à ces instructions, le positionnement de 2 élastiques (blancs sur la photo), pour faire le mécanisme de ressort. L'image ci-dessous montre comment les positionner (je ne savais pas comment les faire figurer dans le modèle MLCAD).
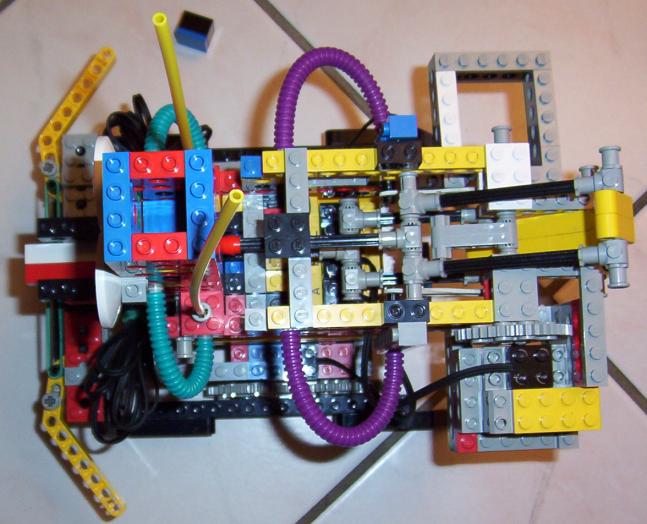
La partie intéressante de ce montage réside dans le mécanisme de lancé de projectile. La motorisation et le système de guidage ne sont que des aspects secondaires que vous aurez le loisir d'agrémenter selon vos souhaits. Dans cette version, la motorisation est une version légèrement modifiée des « pattes » de la Constructopedia 1.5. Le mécanisme de guidage est également une version modifiée du « double-bumper » de la Constructopedia 1.5. J'ai été obligé de le modifier (en l'élargissant) pour l'adapter à la largeur et la hauteur du châssis du canon.
Un seul moteur est nécessaire pour la
mécanique de tir. C'est plutôt économique :) La principale idée est de
créer un système qui en même temps alimente le fût du canon projectile par
projectile et arme puis relâche le propulseur. C'est ce propulseur a m'a
posé le plus de problème car au début je l'avais directement solidarisé au
moteur. Sous tension, le moteur armait donc le chien, et une fois armé,
était sensé passer hors tension pour que le chien revienne en place d'un
seul coup, éjectant à ce moment le projectile. Le problème oublié dans ce
raisonnement est qu'un moteur en roue libre a une résistance !
Donc au lieu de revenir d'un coup, le chien revenait doucement, freiné par
le moteur 
Pour résoudre le problème, le mécanisme d'armement n'est pas solidaire du moteur, c'est uniquement l'espèce de petite patte qui vient pousser les barres courbes jaunes qui est solidaire du moteur. Quand à force de tourner elle n'est plus en contact avec ces barres jaunes, celles-ci attirées par les élastiques reviennent alors d'un coup sec. Voili, voilà.
 Vue globale |
|
 Base |
 Base (avant) |
 Segment 1 du bras (côté) |
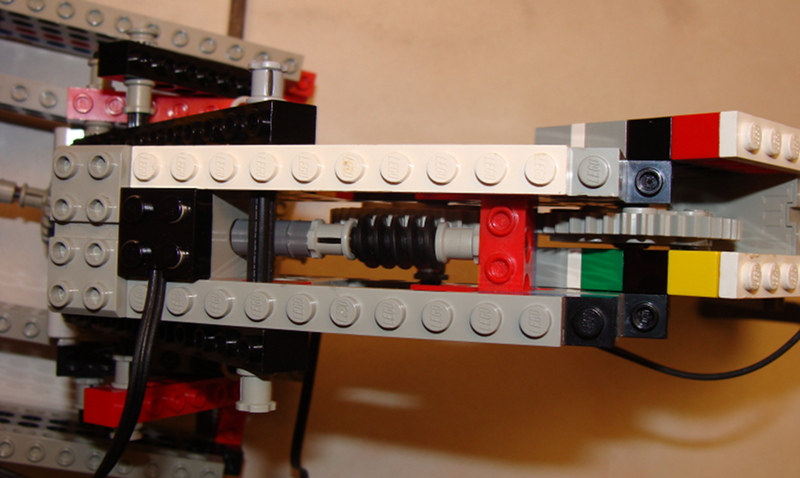 Segment 1 du bras (dessus) |
 Segment 2 du bras (côté) |
 Pince (dessus) |
 |
 |
 |
 |