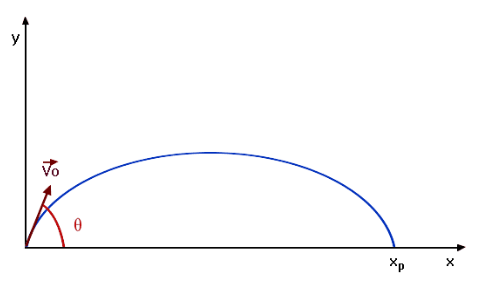
Aujourd’hui, nous savons parfaitement simuler la dynamique de certains phénomènes comme le pendule simple, ou comme la trajectoire de la chute d’un ballon. Et pourtant, nous sommes incapables de prédire la météo à des échelles de temps au-delà du mois : il s’agit en effet d’un phénomène chaotique.
Les systèmes chaotiques peuvent être définis par une extrême sensibilité aux conditions initiales (on souligne le fait que ce n’est pas de l’aléatoire), en effet on parle de chaos lorsque 2 conditions initiales très proches mènent à 2 résultats très différents. Cependant, ce n’est pas l’unique manière de quantifier le chaos, cette étude en présentera d’autres.
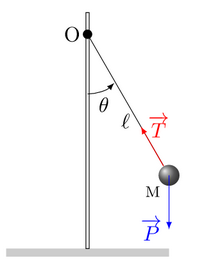
Le système que nous considérons est donc le pendule. Commençons par établir les équations dynamiques qui régissent notre modèle.
Bilan des forces :
Force gravitationnelle :
Dans notre modèle, nous avons considéré pour la force gravitationnelle une simple force de rappel unitaire -x.
Force magnétique :
Pour nos aimants, nous nous plaçons dans l’approximation des dipôles magnétiques, on considère donc naturellement une force magnétique en 1 / distance^4.
Force de frottements (Dissipation d’énergie)
On considère un coefficient de frottement simple alpha.
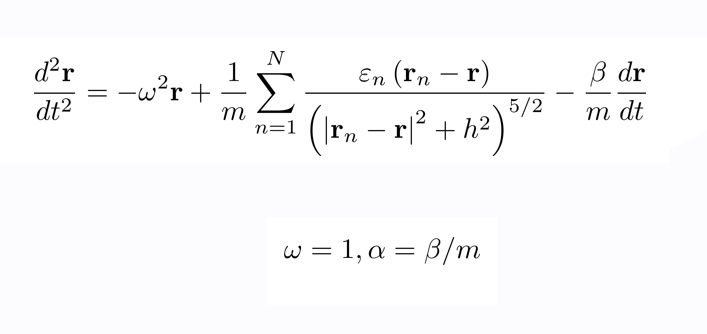
On applique alors le Principe Fondamental de la Dynamique, et on obtient l’équation de la dynamique. On peut alors faire une simulation numérique de notre pendule !
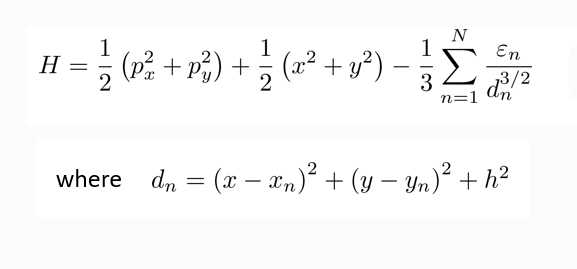
Cependant, cette équation est donc une équation différentielle du second ordre. Dans le cas où nous ne considérons pas les frottements, il n’y a pas de dissipation d’énergie.
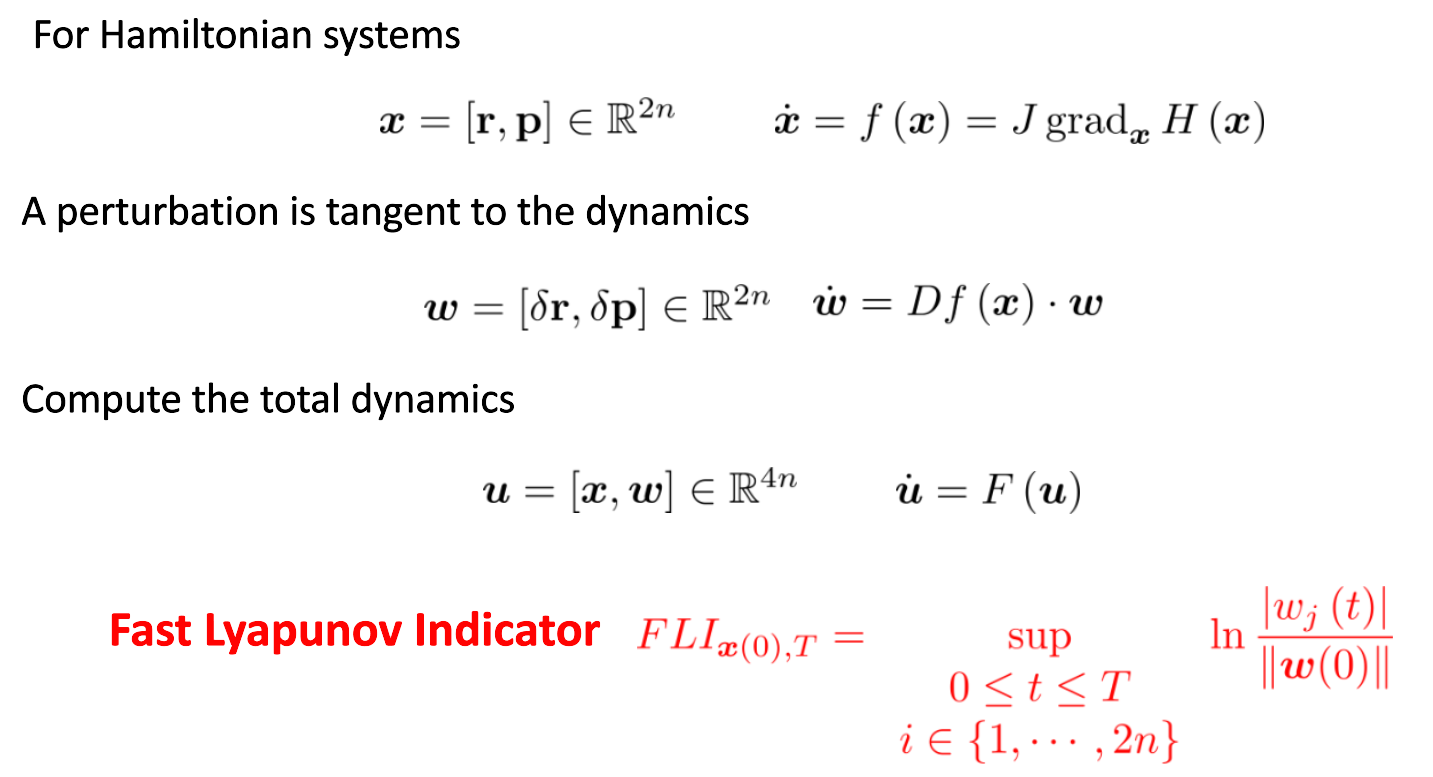
On peut alors se placer dans le cadre de la dynamique Hamiltonienne, toutes les forces considérées sont conservatives. Les équations de Lagrange nous permettent alors de nous ramener à des équations différentielles du premier ordre.
On considère alors les variables d’états (x, y, px, py), et les équations de Lagrange nous donnent alors l'expression ci-contre. Celles-ci nous seront utiles dans notre étude sans dissipation d’énergie.
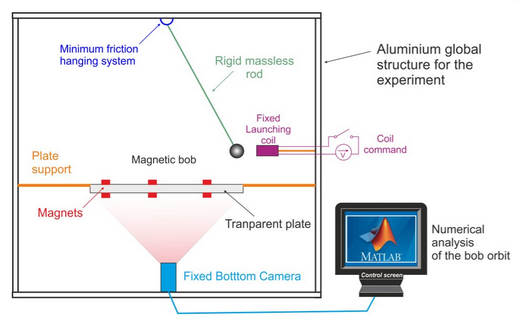
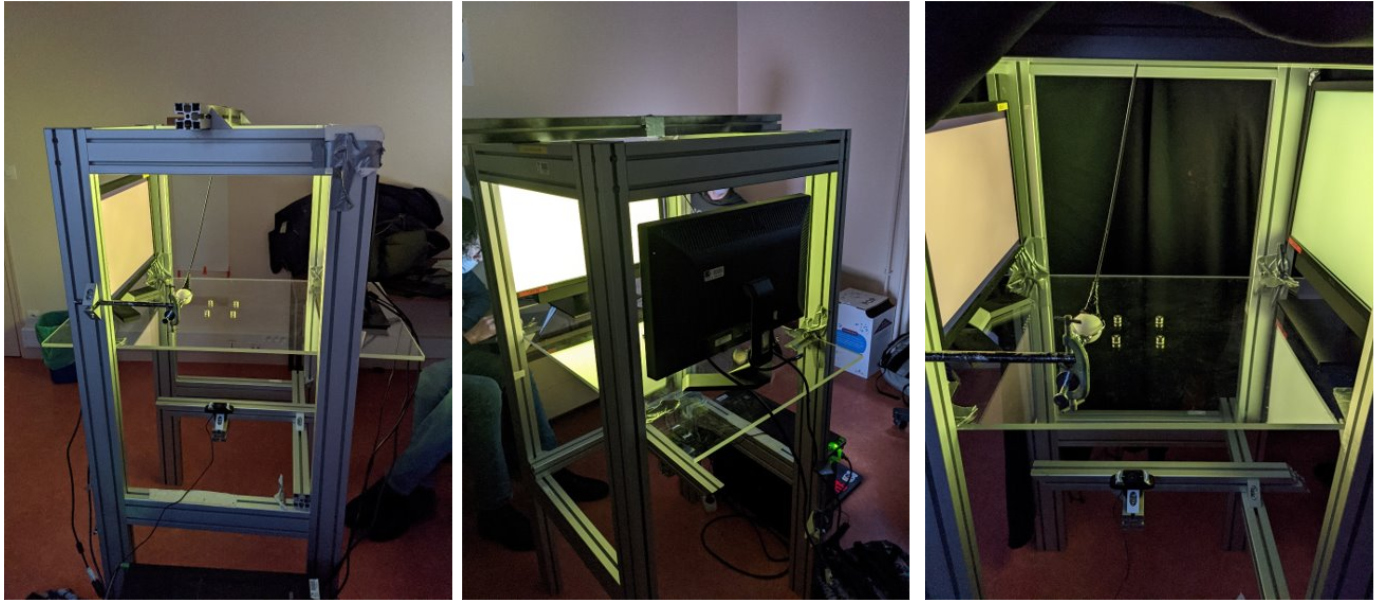
Nous avons tout d’abord construit une structure en métal, sur laquelle nous avons ensuite fixé une plaque en plexiglass. La tige en métal constituant le pendule a été fixée à l’aide d’un fil de pêche afin de minimiser les frottements. Au bout de cette tige, nous avons fixé un aimant entouré d’une balle de tennis de table afin de faciliter le traitement d’image. Nous avons utilisé différentes configurations d’aimants lors de nos expériences, ainsi pour pouvoir les fixer et pour pouvoir toujours être capable de les déplacer ensuite, nous avons placé à chaque fois les aimants de part et d’autre de la plaque. Afin de faciliter le traitement d’image, nous avons ajouté 2 écrans blancs comme lumière et recouvert notre expérience d’un drap noir. Nous avons de plus construit un système de lancement avec un électroaimant pour que nos expériences soient le plus reproductibles possibles.
Le pendule magnétique est un système chaotique : la plus légère variation des conditions initiales entraîne de grands changements de trajectoire. Il ne nous était donc pas possible de reproduire nos expériences : même si on lâchait le pendule au même endroit, la trajectoire prise par celui-ci serait à chaque fois complètement différente. Nous avons donc mesuré une valeur qui ne change pas en fonction des expériences : le coefficient de frottement. On détermine ce coefficient en calculant l’Hamiltonien, en effet la décroissance exponentielle expérimentale de l’énergie représente le coefficient de frottement théorique. Nous avons trouvé des coefficients identiques lors de chacune de nos expériences, ce qui témoigne de l’invariance du coefficient et donc du fait que notre expérience est déterminée théoriquement.
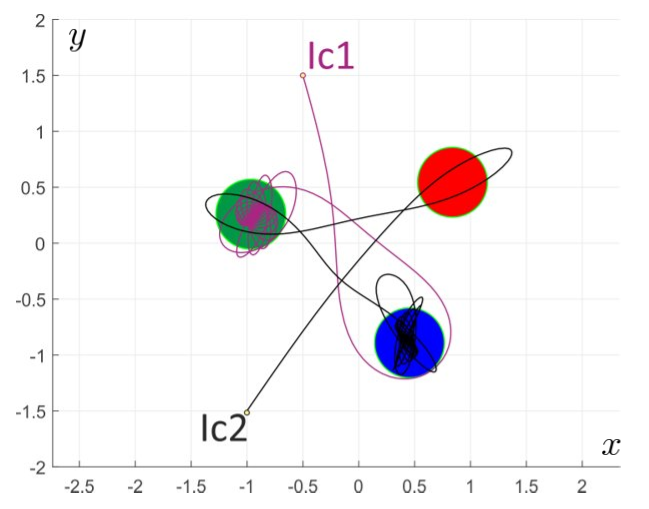
Dans cette partie nous allons nous intéresser aux sections de poincaré, cas d’étude où les frottements ne sont pas considérés.. Le principe est simple, nous nous plaçons dans l’espace des phases (ici de dimension 4 : x, y, px, py).
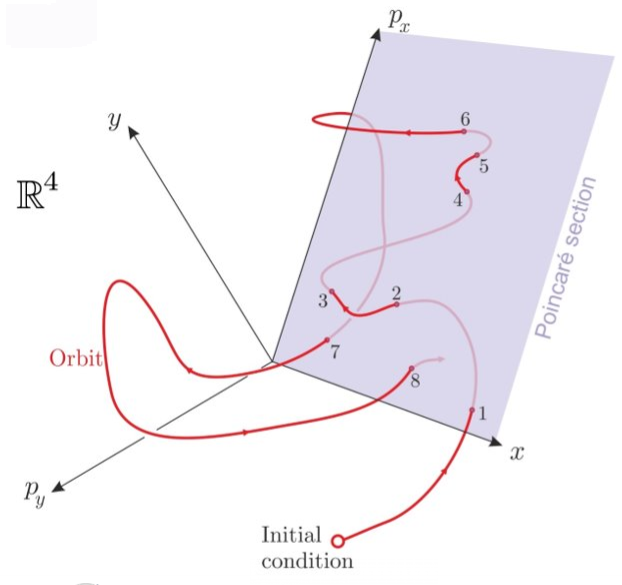
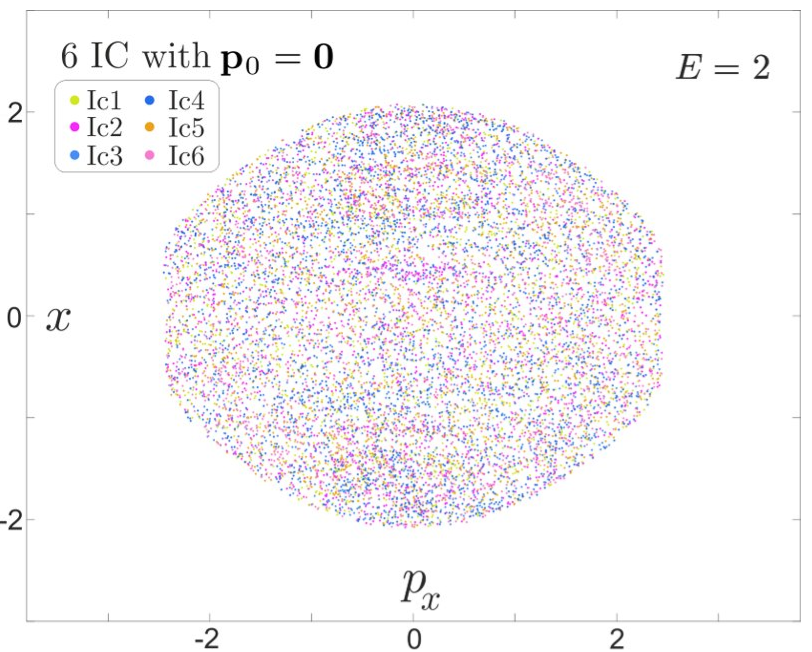
On prend une section de l’espace des phases, par exemple le plan x et px, si l’intersection de la trajectoire avec ce plan est de mesure non-nulle (c’est-à-dire qu’une surface est formée) alors la trajectoire est considérée chaotique. (Intuitivement, la trajectoire dans l’espace des phases prend une infinité de valeurs sans repasser par les mêmes points). Dans le cas de faibles énergies (par exemple en prenant des conditions initiales peu éloignées du centre du pendule), l’intersection formée est une surface donc la trajectoire est considérée comme chaotique.
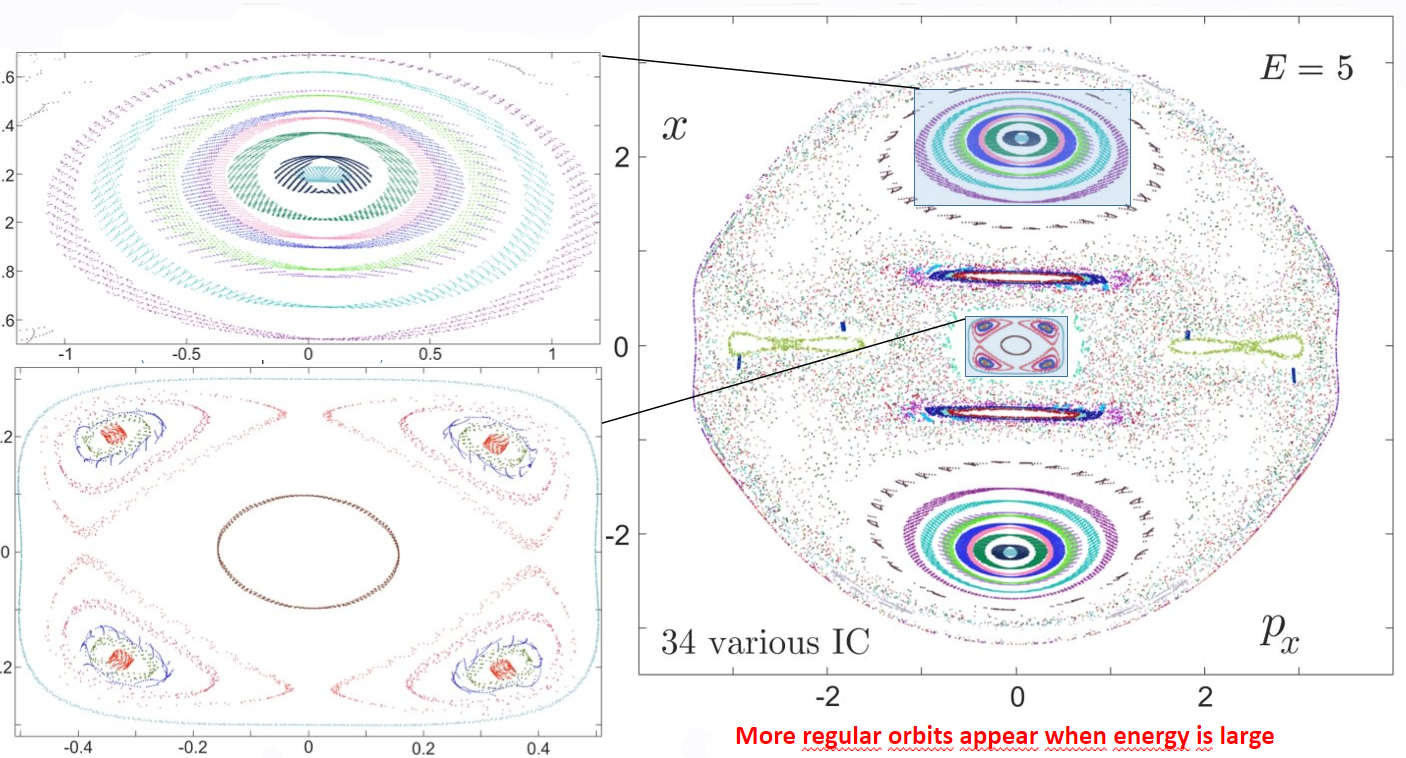
Dans le cas des hautes énergies, on retrouve certaines intersections qui forment des motifs plutôt de dimension 1, par exemple des cercles. Dans ce cas-là, on retrouve des trajectoires davantage périodiques. On peut interpréter cela par le fait qu’aux hautes énergies le bob est moins influencé par les aimants.
Lorsqu’il n’y a pas de frottements, il n’y a pas dissipation d’énergie et notre pendule reste en mouvement. Cependant, la dynamique reste chaotique. Il existe un exposant, qui s’appelle l’exposant de Lyapunov, qui quantifie la différence entre deux trajectoires pour des conditions initiales extrêmement proches.
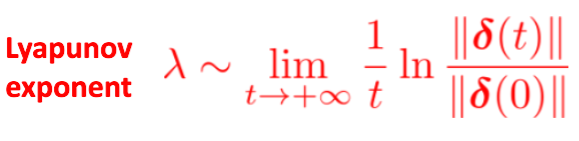
Il est très difficile à calculer en général, mais il peut être approché par le Fast Lyapunov Indicator (FLI).
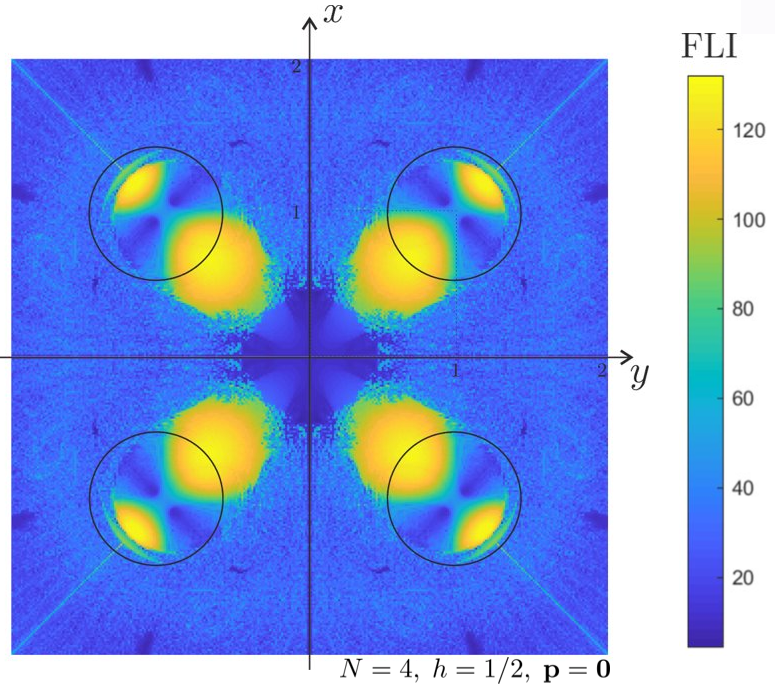
On peut ainsi cartographier une valeur approximative de l’exposant, en fonction des conditions initiales. Sur cette carte, l’exposant de Lyapunov est toujours positif, le système est donc chaotique. Les zones jaunes, où l’exposant atteint de hautes valeurs, indiquent que dans ces zones le système est d’autant plus sensible à ses conditions initiales.
Lors des expériences avec le montage, et donc avec la présence de dissipation d’énergie, la destination finale de la tige variait entre les aimants attractifs pour des conditions initiales proches. Ces positions sont les positions d’équilibre.
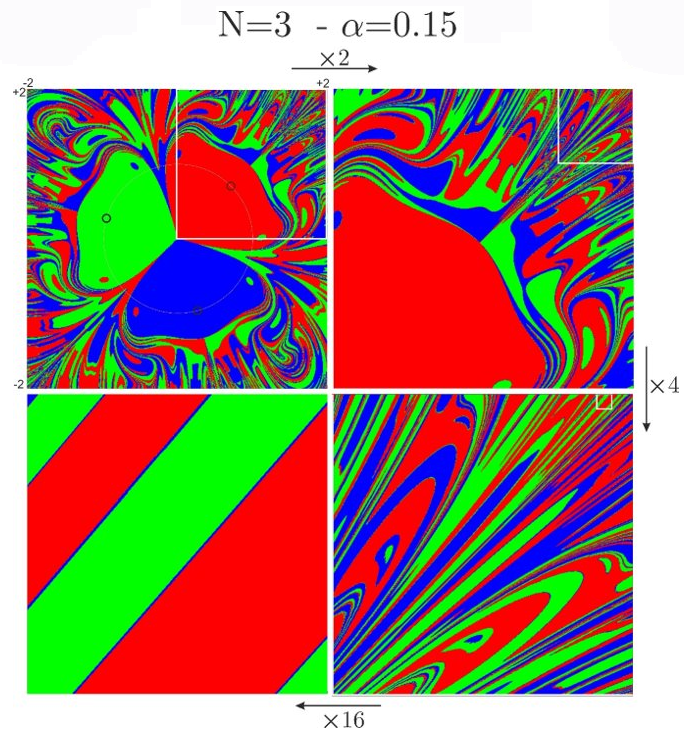
On peut donc réaliser une multitude de simulations numériques, puis cartographier leur position finale par des couleurs, en fonction de la position initiale de la tige. Par exemple, les zones vertes indiquent que lorsque la tige est lancée depuis cette zone, la tige atteint l’équilibre au niveau de l’aimant “vert”.
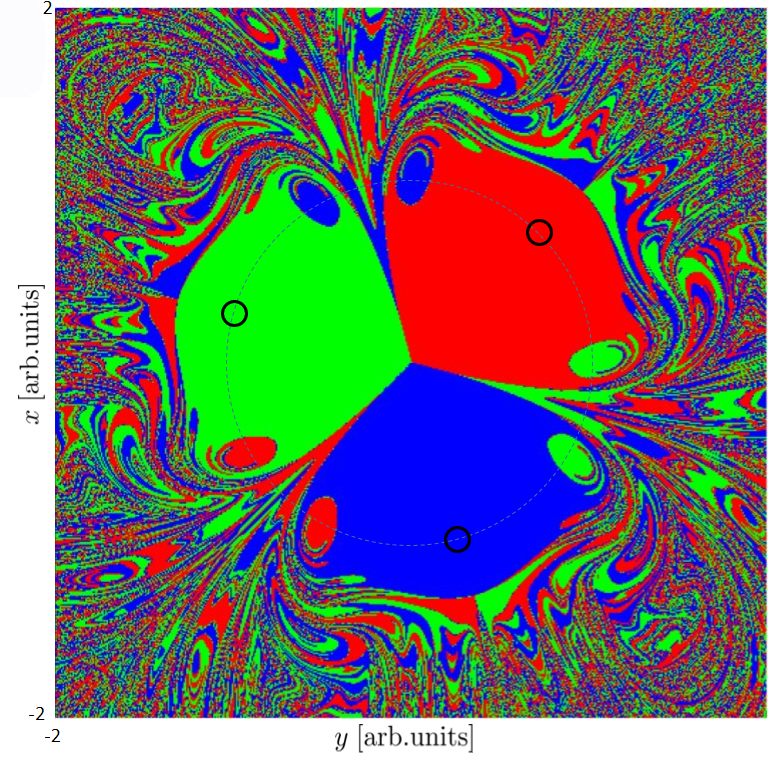
Lorsque l’on regarde les bassins d’attraction, on remarque qu’ils possèdent une propriété particulière : ce sont des bassins de Wada. En effet, entre 2 zones de couleurs différentes, il y aura toujours une autre couleur entre les 2 : toutes les zones colorées partagent la même frontière.